



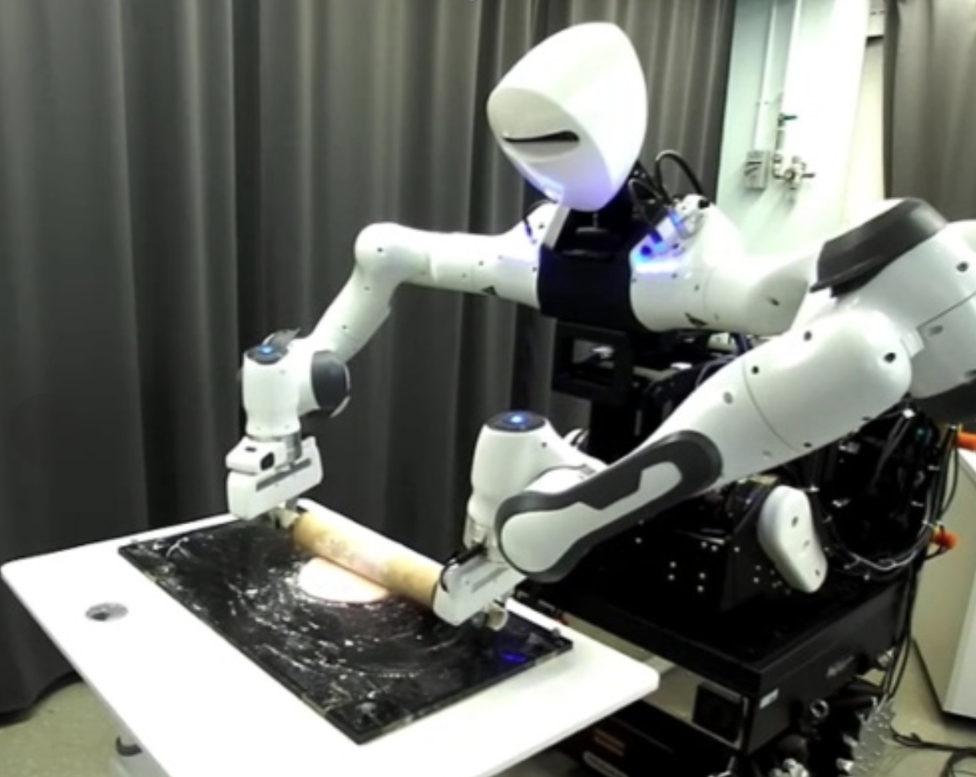

双臂力感知遥操作中的协作与精细操作
Franka双臂机器人+灵巧手操作

基于Franka Research 3的腹腔镜手术应用
Franka Research 3通过腹腔镜视频的分析,及时为外科医生提供所需器械。在测试过程中,机器人系统成功预测了71.54%的手术器械需求,显著提高了手术流程的流畅度,并减少了手术室内的口头沟通。

Franka Robotics双臂遥操作
FR3与Diana7机器人联合展示具身智能操作方案。Franka FR3以高精度操作和智能编程能力,成为AI研究关键载体。双机协同结合开源开发框架,通过7轴精密力控提供实时操作感知,并开放底层数据接口,为具身智能技术突破提供高精度实验平台与数据支撑。




