在论文描述的真实世界测试中,Franka机械臂与DexterityGen的协同表现出色:
- 多任务适应性 机械臂成功完成了物体重定向(如将立方体转至指定角度)、多功能抓取(从捏取到动力抓取切换)以及长时程任务(如螺丝刀拧紧螺栓、注射器注液)。即使面对未见过的新物体(如异形零件),系统仍能通过零样本泛化完成操作。

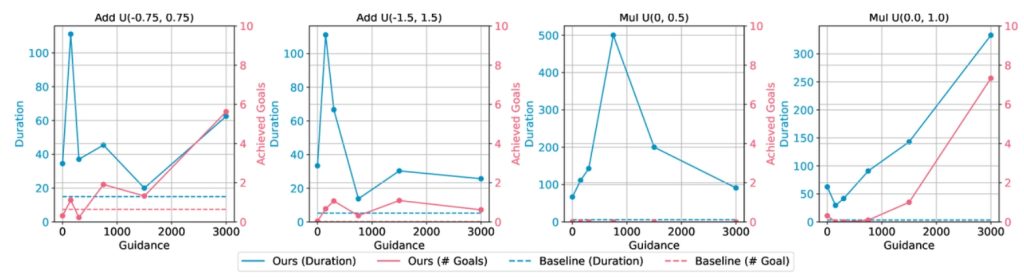
- 抗干扰能力 在模拟噪声干扰下,DexterityGen可将原本频繁失败的策略(如抖动指令)稳定化,任务持续时间提升10-100倍。Franka机械臂的高刚性结构进一步减少了物理震动对精度的影响。